30 лет на рынке
деталей машин и оборудования
направляйте на Email
info@finval-parts.ru
800-1900










Линейные двигатели
Производители серводвигателей предлагают различные линейные двигатели, такие как Fanuc (Япония), Mitsubishi (Япония), Sew-eurodrive (Германия), Siemens (Германия), ABB и др.
Преимущества линейных двигателей перед серводвигателями:
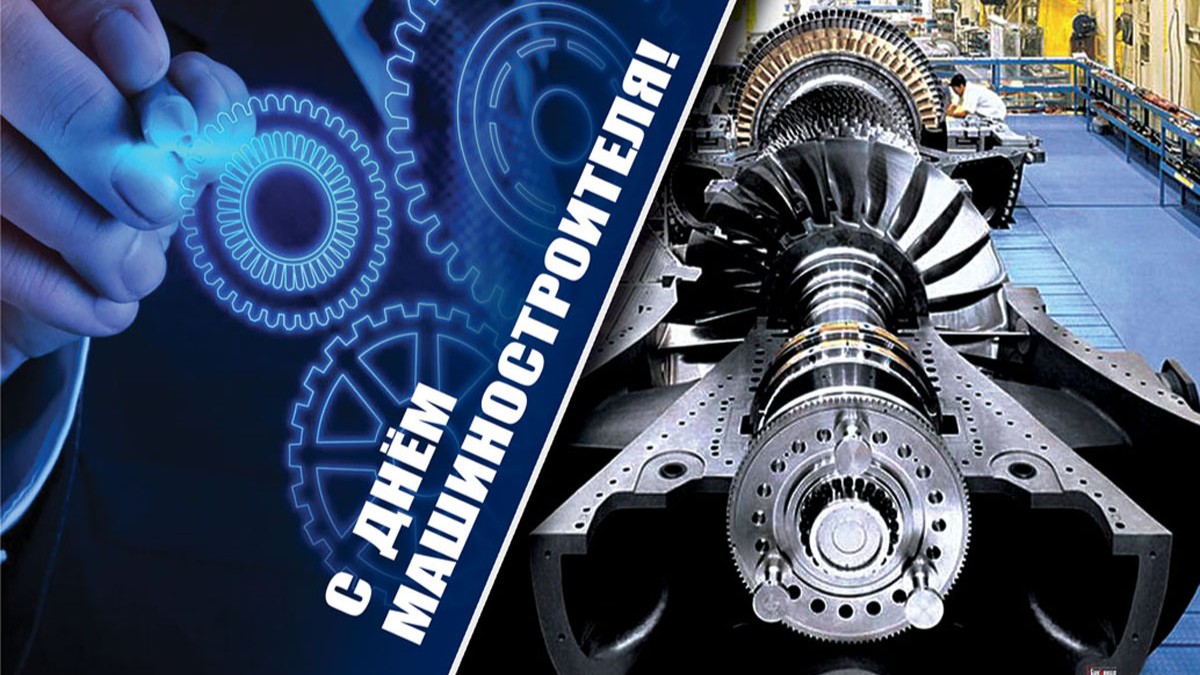
Состав типовой сервосистемы на основе линейного двигателя (рис. 1):
Линейный двигатель состоит из двух частей - это первичная и вторичная секция. Первичная секция соответствует статору вращающегося двигателя, включает в себя шихтованный магнитопровод и температурный датчик. Вторичная секция представляет собой ротор, который состоит из стального несущего каркаса с магнитами. Линейный двигатель - это вращающийся двигатель, принципы работы которого остаются неизменными (рис.2). Однако в линейном двигателе движение совершает первичная секция (обмотка), в то время как вторичная секция (ротор) остается неизменной.

При увеличении зазора нагрузочная способность двигателя уменьшается. На величину и точность зазора влияют направляющие прямолинейного движения и рабочий стол, поэтому для нормальной работы линейного двигателя необходимо выдержать этот зазор между первичной и вторичной секциями.
Линейный двигатель также как и серводвигатель управляется за счет блока управления, при этом на одной оси можно установить две первичные секции, которые работают параллельно от одного блока управления. Они должны быть одного типоразмера и иметь одинаковый тип обмотки.
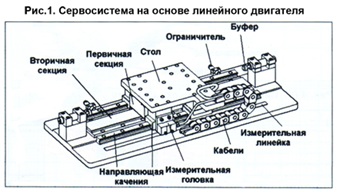
Температурный режим является очень важным моментом для линейных двигателей, поэтому производители предлагают двигатели с воздушным и водяным (масляным) охлаждением. Это может быть один и тот же двигатель, работающий в разных режимах. На рис. 3 показана простая схема системы водяного охлаждения.
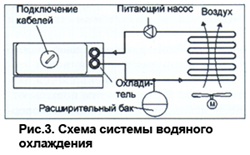
На рис. 4 (а) изображена система воздушного охлаждения первичной секции двигателя фирмы Sew-Eurodrive с вентилятором. На рис. 4 (б) показан линейный двигатель Siemens с дополнительным водяным радиатором направленного охлаждения.
Линейные двигатели оснащают датчиком температуры, который предотвращает перегрев. Датчик отключается при достижении двигателем температуры обмотки ≈ 120ºС. Основными характеристиками линейного двигателя являются:
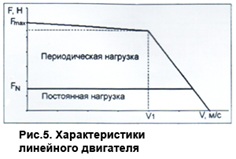
На рис.5 показана зависимость тягового усилия от линейной скорости. Номинальное усилие FN определяется при помощи температурного режима. При максимальном усилии двигатель способен работать ограниченное время, причем не во всем диапазоне скоростей.
В таблице 1 приведены данные характеристик линейных двигателей от различных производителей. Номинальное тяговое усилие приводится при воздушном и водяном охлаждении (разделены знаком «/»).
Таблица 1. Характеристики линейных двигателей
|
Fmax, H
|
Mitsubishi(тип HALM 12, 14)
|
Sew-Eurodrive (тип SL2-Basic)
|
Siemens (тип 1FN3)
|
Рухсервомотор (тип LSM-36)
|
||||||||||||
|
FN, H
|
Fd, H
|
Vmax,м/с
|
m, кг
|
FN, H
|
Fd, H
|
Vmax,м/с
|
LxB,мм
|
FN, H
|
Fd, H
|
Vmax,м/с
|
LxB,мм
|
FN, H
|
Fd, H
|
Vmax,м/с
|
LxB,мм
|
|
|
250
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
212 / 109
|
900
|
10,0
|
163х65
|
|
500
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
200 / 100
|
1330
|
5,3
|
150x96
|
418 / 214
|
1800
|
10,0
|
163x90
|
|
650
|
-
|
-
|
-
|
-
|
- / 280
|
1480
|
8,0
|
192x84
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
750
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
617 / 316
|
2750
|
8,1
|
163x120
|
|
1100
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
450 / 225
|
2650
|
8,3
|
255x96
|
836 / 429
|
3600
|
6,0
|
307x90
|
|
1300
|
-
|
-
|
-
|
-
|
- / 560
|
2880
|
6,9
|
368x84
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
1500
|
250/500
|
3750
|
2
|
8,5
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
1234 / 633
|
5500
|
7,0
|
307x120
|
|
2000
|
-
|
-
|
-
|
-
|
- / 840
|
4300
|
6,4
|
544x84
|
-
|
-
|
-
|
-
|
1559 / 796
|
7300
|
10,0
|
307x145
|
|
2750
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
1125 / 550
|
6630
|
4,3
|
570x96
|
-
|
-
|
-
|
-
|
|
3000
|
500/1000
|
7500
|
2
|
15
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
2339 / 1193
|
11000
|
7,6
|
451x145
|
|
3500
|
-
|
-
|
-
|
-
|
1225 / 610
|
6870
|
13,0
|
382x141
|
-
|
-
|
-
|
-
|
||||
|
4000
|
-
|
-
|
-
|
-
|
- / 1800
|
8570
|
6,9
|
544x134
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
4500
|
750/1500
|
11250
|
2
|
22
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
3394 / 1727
|
16500
|
5,1
|
451x195
|
|
5200
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
1930 / 965
|
10300
|
14,0
|
543x141
|
-
|
-
|
-
|
-
|
|
5800
|
-
|
-
|
-
|
-
|
- / 2700
|
12860
|
6,4
|
544x184
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
6000
|
1000/2000
|
15000
|
2
|
27
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
4526 / 2303
|
22000
|
3,8
|
595x195
|
|
7700
|
-
|
-
|
-
|
-
|
- / 3600
|
17000
|
6,4
|
720x184
|
2895 / 1450
|
15450
|
8,7
|
543x188
|
5657 / 2878
|
27500
|
3,0
|
739x195
|
|
9000
|
1500/3000
|
22500
|
2
|
40
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
10000
|
-
|
-
|
-
|
-
|
- / 4500
|
21430
|
3,5
|
544x284
|
3860 / 1930
|
20600
|
8,7
|
704x188
|
-
|
-
|
-
|
-
|
|
12500
|
2000/4000
|
30000
|
2
|
53
|
- / 6000
|
28450
|
3,3
|
720x284
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
|
14000
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
-
|
5220 / 2600
|
27460
|
4,3
|
704x248
|
-
|
-
|
-
|
-
|
Исходные данные для расчета:
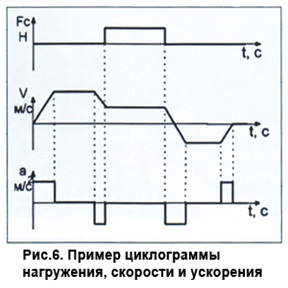
Циклограммы нагружения, скорости и ускорения необходимы для правильного выбора линейного двигателя (рис.6). Циклограмма ускорения является производной, ускорение а, м/с2 определяют по формуле а = V ÷ ta.
Данный расчет предполагает, что вторичная секция линейного двигателя является неподвижной. На первом этапе подбираем двигатель, применив следующую формулу
Fmax = 1,5 ∙ (Fg + Fa),
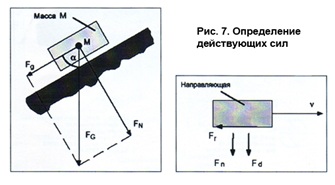
где Fg, Н – эффективная составляющая гравитационной силы (рис.7, а); Fa– сила энерции при разгоне.
По данным производителя выбираем двигатель с необходимым Fmax и потребной скоростью Vmax, далее определяем силу трения Fr, Н, которая возникает в направляющих качения (рис.7, б) по формуле:
Fmax = µ ∙ (Fn + Fd),
где Fn – нормальная составляющая силы трения; Fd – сила магнитного притяжения первичной секции. Записываем : Fr = µ ∙ [(М+m) ∙ g ∙ sin α + Fd], где µ, кг – масса первичной секции.
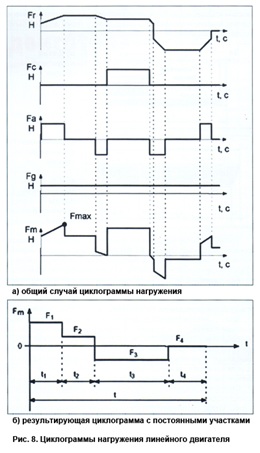
Сила трения зависит также от коэффициентов трения покоя, скорости движения, скольжения и силы прижатия клина направляющей. На рис.8 (а) приведена циклограмма именно для такого случая.
Определяем силу инерции Fa, Н, возникающую при разгоне/торможении двигателя, используя формулу Fa = (M+m) ∙ a.
Сумма сил определяем при помощи уравнения:Fm = Fc + Fg + Fa + Fr.
Необходимо построить циклограммы всех действующих сил и результирующую циклограмму (рис.8) и точно определить максимально потребную силу Fmax, Н. Предварительно выбранный двигатель должен развивать максимальное тяговое усилие, кроме этого необходимо определить номинальное усилие, при котором двигатель может работать продолжительное время. Номинальное тяговое усилие FN, Н, ограничивается температурой двигателя и определяется формулой:
При ступенчатой результирующей циклограмме нагружение (рис.8, б) (направляющие качения) FN = √1/t ∙ (F12t1 + F22t2 + F32t3 + … + Fn2tn).
После выбора первичной секции выбираем вторичную секцию. Длина вторичной секции (рис.9, а) Ls, мм определяется по формуле Ls ≥ L + Lp + (2 ∙ SE), где L, мм – рабочий ход; Lp, мм – активная длина первичной секции; SE, мм – запас хода на переключение (≈20 мм). На одной вторичной секции можно устанавливать несколько первичных (рис.9, б). При этом длину вторичной секции нужно увеличить на длину первичной секции и на зазор между ними.
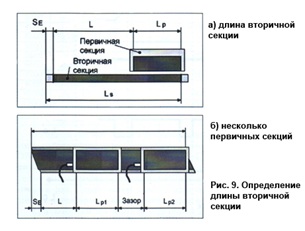
Требуемый ход можно обеспечить за счет набора вторичных секций различной длины, при этом выгодно использовать большое число коротких сегментов вместо нескольких длинных.
Можно выбрать несколько двигателей с разными размерами и с равными максимальными и номинальными тяговыми усилиями.
Рекомендации при выборе линейного двигателя:
Наша компания осуществляет поставку двигателей Siemens, ABB, Sew Eurodrive, Control Techniques, Leroy Somer, Lenze, Indramat и других мировых брендов.
Для того, чтобы купить продукцию в нашей компании, достаточно позвонить по телефону
Найти подходящее решение именно для вашего бизнеса помогут квалифицированные специалисты нашей компании.
Если Вы хотите сделать заказ, можете связаться с нами через форму обратной связи либо по телефону:
Телефон / факс: +7 (495) 649 80 55
Электронная почта:




Новости